エイシーティ株式会社について
新しいCAE技術の探求を目指し、2002年の設立以来、
先進的な解析ソリューションを提供し続けています

CAE構築・推進のベストパートナー
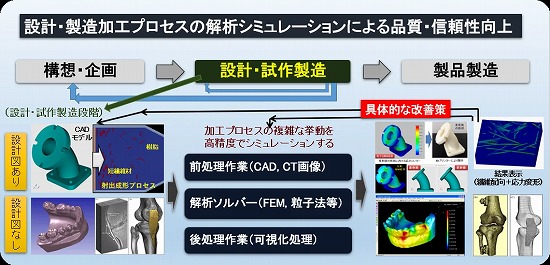
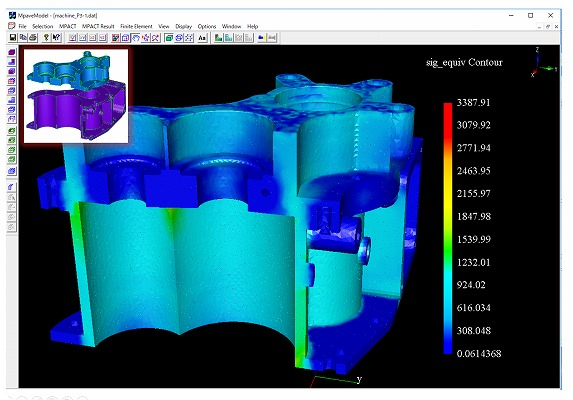
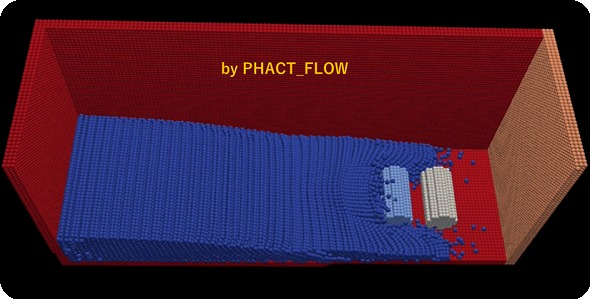
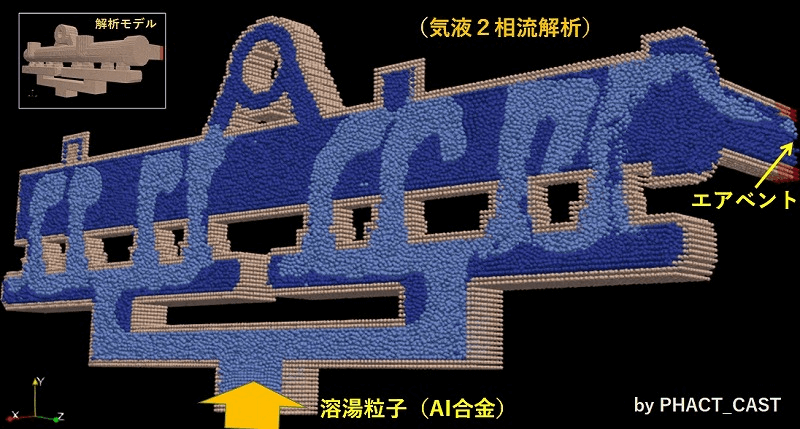
エイシーティ株式会社は、解析シミュレーションソフトウェアの研究開発、販売、保守、 およびコンサルティングサービスを行う専門企業です。
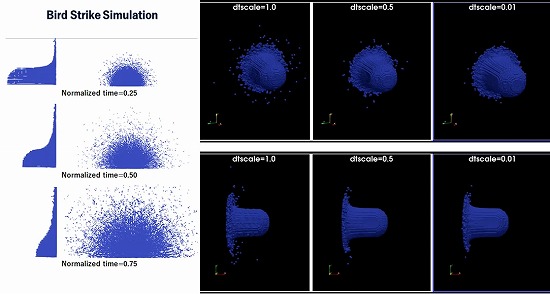
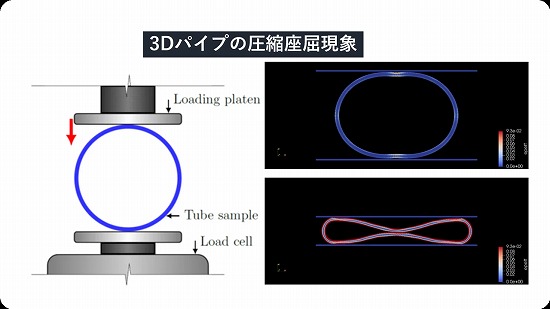
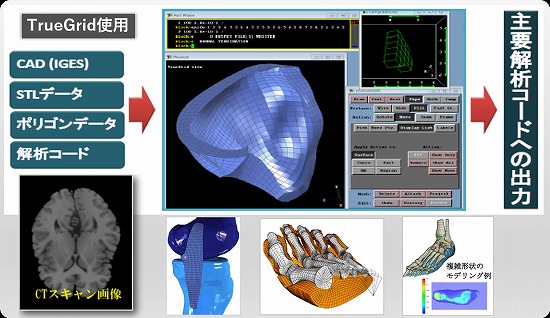
複雑な材料挙動・機械特性を精度よくシミュレーションする高度な技術力と、 ソースプログラム保有により顧客ニーズに応じたカスタマイズ対応が可能です。
2002
設立年
20+
年の実績